Re: Schlitten für Fokusstacking
So 24. Sep 2017, 08:29
mesisto hat geschrieben:Deepflights hat geschrieben:Mal eine Frage an die die jetzt alle das neue Kabel bekommen haben, funktioniert es nun wie gewünscht?
Siehe PN... hab grad geantwortet.
Ich auch.
Re: Schlitten für Fokusstacking
So 24. Sep 2017, 11:30
pstenzel hat geschrieben:mesisto hat geschrieben:Deepflights hat geschrieben:Mal eine Frage an die die jetzt alle das neue Kabel bekommen haben, funktioniert es nun wie gewünscht?
Siehe PN... hab grad geantwortet.
Ich auch.
Als einer, der noch auf sein Kabel wartet, sage ich nur: Heimlichtuer!

Re: Schlitten für Fokusstacking
Di 26. Sep 2017, 21:11
Hallo zusammen,
da ich auch bald meinen Schlitten bekommen werde, habe ich mich heute Abend auch mal intensiver mit der Befestigung beschäftigt. Da ich bisher hauptsächlich Manfrotto 200PL benutze möchte ich eigentlich bei dem System bleiben, für die Befestigung des Schlittens auf dem Stativ sollte das auch kein Problem sein. Allerdings habe ich bisher keine Manfrotto (kompatible) Klemme für die obere Seite des MacroBots gefunden, die eine plane Unterseite hat. Die MA323 ist jedenfalls nicht plan.
Hat jemand von euch dazu eine Lösung gefunden? Ansonsten werde ich mir die von Hans empfohlene CL50-LS kaufen und dann ggf. die Platten an der Kamera wechseln.
Gruß Rolf
da ich auch bald meinen Schlitten bekommen werde, habe ich mich heute Abend auch mal intensiver mit der Befestigung beschäftigt. Da ich bisher hauptsächlich Manfrotto 200PL benutze möchte ich eigentlich bei dem System bleiben, für die Befestigung des Schlittens auf dem Stativ sollte das auch kein Problem sein. Allerdings habe ich bisher keine Manfrotto (kompatible) Klemme für die obere Seite des MacroBots gefunden, die eine plane Unterseite hat. Die MA323 ist jedenfalls nicht plan.
Hat jemand von euch dazu eine Lösung gefunden? Ansonsten werde ich mir die von Hans empfohlene CL50-LS kaufen und dann ggf. die Platten an der Kamera wechseln.
Gruß Rolf
Re: Schlitten für Fokusstacking
Di 26. Sep 2017, 21:25
rolfbe hat geschrieben:Hallo zusammen,
da ich auch bald meinen Schlitten bekommen werde, habe ich mich heute Abend auch mal intensiver mit der Befestigung beschäftigt. Da ich bisher hauptsächlich Manfrotto 200PL benutze möchte ich eigentlich bei dem System bleiben, für die Befestigung des Schlittens auf dem Stativ sollte das auch kein Problem sein. Allerdings habe ich bisher keine Manfrotto (kompatible) Klemme für die obere Seite des MacroBots gefunden, die eine plane Unterseite hat. Die MA323 ist jedenfalls nicht plan.
Hat jemand von euch dazu eine Lösung gefunden? Ansonsten werde ich mir die von Hans empfohlene CL50-LS kaufen und dann ggf. die Platten an der Kamera wechseln.
Gruß Rolf
...Hi Rolf,....ich benutze diese Version,...nicht ganz billig,..... aber gut

*** Der Link ist nur für Mitglieder sichtbar. Bitte registriere Dich, oder logge dich ein. ***
beste Grüße
Bernd
Re: Schlitten für Fokusstacking
Do 28. Sep 2017, 15:32
An alle die schon einen Macrobot haben:
Wenn er mit aktivierten Motor "sehr" laut und/oder seltsames Auslöseverhalten zeigt, ich habe etwas gefunden. Bug wäre zuviel gesagt, es geht eher um Resonanzfrequenzen.
Ich poste heue Abend eine Anleitung dazu.
Raussuchen könnt ihr schon mal ein MiniUSB Kabel und einen sehr feinen Schraubendreher.
An all diejenigen die bereits wg. Versand per PN bescheid bekommen haben:
Ich habe aufgrund des Problems alles gestoppt, eure Bots gehen bereits mit Update heute gleich raus, Trackingnummer gibts dann auch anschliessend.
Was ein Drecksfehler, echt, ich konnte ihn nicht "nachbauen" und war erstmal ratlos, bis mir heute Morgen eine ganz alte Geschichte eingefallen ist.....
Wieder weg, muss eintüten.
Wenn er mit aktivierten Motor "sehr" laut und/oder seltsames Auslöseverhalten zeigt, ich habe etwas gefunden. Bug wäre zuviel gesagt, es geht eher um Resonanzfrequenzen.
Ich poste heue Abend eine Anleitung dazu.
Raussuchen könnt ihr schon mal ein MiniUSB Kabel und einen sehr feinen Schraubendreher.
An all diejenigen die bereits wg. Versand per PN bescheid bekommen haben:
Ich habe aufgrund des Problems alles gestoppt, eure Bots gehen bereits mit Update heute gleich raus, Trackingnummer gibts dann auch anschliessend.
Was ein Drecksfehler, echt, ich konnte ihn nicht "nachbauen" und war erstmal ratlos, bis mir heute Morgen eine ganz alte Geschichte eingefallen ist.....
Wieder weg, muss eintüten.
Re: Schlitten für Fokusstacking
Do 28. Sep 2017, 22:37
So, wie versprochen, das Update.
Einige hatten das Problem, dass der Macrobot, sobald die Schrittmotorelektronik aktiviert war, ein unerwünschtes Eigenleben entwickelte.
Ich habe den Schrittmotor soweit eingestellt, dass er die grösstmögliche Kraft entwickelt, ich weiss ja nicht was ihr dem Schlitten alles zumuten wollt.
Es gibt allerdings dann eine Entwicklung die man als Eigenresonanz bezeichnet.
Bei Stillstand und zu hohen Strom erreicht das Magnetfeld des Schrittmotors seinen Sättigungsgrad und alles was darüber hinaus geht senden die Spulen in die Luft, wir haben also so etwas wie einen Sender, auch wenn er sehr wenig Feldstärke hat.
Diese reicht aber aus, um in der dahinterliegenden Schrittmotorplatine ein kleines Chaos auszulösen, die Leiterbahnen sind offensichtlich (und dummerweise) recht empfänglich für diese Frequenz, das Signal wird also eingespeist und durch die Leiterbahnenabstände auch noch verstärkt.
Das bringt z.b. den Optokoppler dazu, aktiv zu werden und schliesst seinen Ausgang kurz, es erfolgt eine Auslösung an der Kamera.
Auch steigt der Stromverbraucht recht steil an und daher sinkt die Spannungsanzeige bei der Steuerungsanzeige teilw. in den Minusbereich.
Abhilfe bringt eine leichte Absenkung des Schrittmotorstroms.
Genug gelangweilt, kommen wir zum Punkt:
Ihr braucht zunächst mal ein wenig Software. Ich weiss das einige einen Mac nutzen, ich habe allerdings kein Pendant für angebissene Äpfel gefunden. Es muss also Windows sein.
*EDIT pixiac* ZIP-Datei: https://pentaxians.eu/forumi ... crobot.zip
LESEN!
Dateiendung ist wieder mal ein Fake, es ist tatsächlich ein ZIP Datei, also nach dem Runterladen die Endung ändern.
Nach dem Entpacken findet ihr in dem Ordner eine XLoader.exe, diese habe ich etwas verändert, damit ihr dort so wenig wie möglich einstellen müsst.
Diese Exe ist selbstverständlich voller Trojaner, natürlich auch Makroviren und anderes Getier. ich muss auch von etwas leben.
ich muss auch von etwas leben. 
Auch ist in diesem Ordner eine macrobot.hex enthalten, dieses ist die eigentliche Software.
Wir brauchen den COM-Port des Steuergerätes, die die wissen wie es geht, weiterblättern, die anderen starten die XLoader.exe und klicken auf COM port.
Alles was angezeigt wird, merken.
Jetzt erfolgt der Upload der neuen Software, im Fenster unten links wird der Status angezeigt.
Sobald alles fertig ist, kann man alles abstöpseln, Softwaretechnisch sind wir fertig.
Jetzt kommt der praktische Teil.
Das wars....
Frank, wenn Du so nett sein könntest und die üblichen Fakedateiendungen mit den technisch richtigen tauschen, Danke.
Den Text mit den Umwandlungshinweisen kannst Du dann gern löschen.
Einige hatten das Problem, dass der Macrobot, sobald die Schrittmotorelektronik aktiviert war, ein unerwünschtes Eigenleben entwickelte.
Ich habe den Schrittmotor soweit eingestellt, dass er die grösstmögliche Kraft entwickelt, ich weiss ja nicht was ihr dem Schlitten alles zumuten wollt.
Es gibt allerdings dann eine Entwicklung die man als Eigenresonanz bezeichnet.
Bei Stillstand und zu hohen Strom erreicht das Magnetfeld des Schrittmotors seinen Sättigungsgrad und alles was darüber hinaus geht senden die Spulen in die Luft, wir haben also so etwas wie einen Sender, auch wenn er sehr wenig Feldstärke hat.
Diese reicht aber aus, um in der dahinterliegenden Schrittmotorplatine ein kleines Chaos auszulösen, die Leiterbahnen sind offensichtlich (und dummerweise) recht empfänglich für diese Frequenz, das Signal wird also eingespeist und durch die Leiterbahnenabstände auch noch verstärkt.
Das bringt z.b. den Optokoppler dazu, aktiv zu werden und schliesst seinen Ausgang kurz, es erfolgt eine Auslösung an der Kamera.
Auch steigt der Stromverbraucht recht steil an und daher sinkt die Spannungsanzeige bei der Steuerungsanzeige teilw. in den Minusbereich.
Abhilfe bringt eine leichte Absenkung des Schrittmotorstroms.
Genug gelangweilt, kommen wir zum Punkt:
Ihr braucht zunächst mal ein wenig Software. Ich weiss das einige einen Mac nutzen, ich habe allerdings kein Pendant für angebissene Äpfel gefunden. Es muss also Windows sein.
*** Der Link ist nur für Mitglieder sichtbar. Bitte registriere Dich, oder logge dich ein. ***
*EDIT pixiac* ZIP-Datei: https://pentaxians.eu/forumi ... crobot.zip
LESEN!
Dateiendung ist wieder mal ein Fake, es ist tatsächlich ein ZIP Datei, also nach dem Runterladen die Endung ändern.
Nach dem Entpacken findet ihr in dem Ordner eine XLoader.exe, diese habe ich etwas verändert, damit ihr dort so wenig wie möglich einstellen müsst.
Diese Exe ist selbstverständlich voller Trojaner, natürlich auch Makroviren und anderes Getier.
ich muss auch von etwas leben. Auch ist in diesem Ordner eine macrobot.hex enthalten, dieses ist die eigentliche Software.
Wir brauchen den COM-Port des Steuergerätes, die die wissen wie es geht, weiterblättern, die anderen starten die XLoader.exe und klicken auf COM port.
Alles was angezeigt wird, merken.
- Steuergerät mit Mini-USB an den Rechner anstöpseln NICHT EINSCHALTEN! der USB Port hat 5V und versorgt den Arduino.
- COM-Port eintragen, wenn also jetzt ein neuer COM-Port angezeigt wird, ist es das Steuergerät, diesen auswählen.
- Bei "Hex File" wählen wir den Pfad zur macrobot.hex aus.
- Die Baudrate passt, also dort nichts verändern.
- Upload anklicken.
Jetzt erfolgt der Upload der neuen Software, im Fenster unten links wird der Status angezeigt.
Sobald alles fertig ist, kann man alles abstöpseln, Softwaretechnisch sind wir fertig.
Jetzt kommt der praktische Teil.
- MacroBot muss normal hingestellt werden!
- Rückdeckel der Schrittmotorsteuerung entfernen.
- Das Potentiometer nur mit sehr viel Feingefühl drehen, wäre es eine Uhr, drehen wir höchstens in Minutenschritten.
- Position des Kreuzes einigermassen merken. wir drehen grundsätzlich zuerst in die angezeigte Richtung!
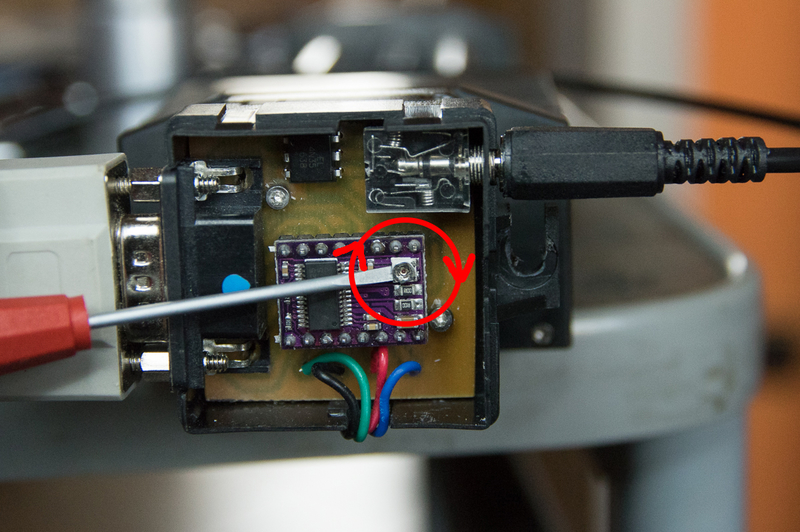
- Macrobot einschalten und auf "Manuell" oder "Easy" gehen, damit die Elektronik aktiviert wird.
- Jetzt drehen wir solange wie im Bild angegeben bis man den Schrittmotor nicht mehr oder kaum noch hört.
- Jetzt wieder ins Hauptmenü wechseln.
- Erneut in einen der Programme wechseln, keine Buttons drücken und bei Bedarf in die Gegenrichtung sehr vorsichtig zurückdrehen bis man den Motor etwas hört.
- Eine der Richtungstasten drücken, ist der Motor nun ruhig oder kaum noch hörbar ist, hat einen guten Punkt erreicht. Wenn man nun beim Fahren den Schlitten nur mit Kraftaufwand aufhalten kann, ist man fertig. Wenn es zu leicht geht, wieder mit Gefühl gegen den Uhrzeigersinn drehen. (nicht vergessen, Minutenweise)
Der Motor darf nur handwarm werden, ansonsten ist der Strom wieder zu hoch. Die Elektronik wird evtl. wärmer, auch OK, ihr könnt ruhig den Finger draufhalten, es passiert nichts.
Auf alle Fälle niemals mehr vordrehen als die Position ursprunglich war, ansonsten bratet ihr die Steuereinheit.
Das wars....
Frank, wenn Du so nett sein könntest und die üblichen Fakedateiendungen mit den technisch richtigen tauschen, Danke.
Den Text mit den Umwandlungshinweisen kannst Du dann gern löschen.
Zuletzt geändert von Deepflights am Fr 29. Sep 2017, 01:39, insgesamt 3-mal geändert.
Re: Schlitten für Fokusstacking
Do 28. Sep 2017, 23:23
Deepflights hat geschrieben:Diese Exe ist selbstverständlich voller Trojaner,
Kurbeln dann nach dem Update kleine Männchen von Hand am Bot statt das einem Motor zu überlasssen? ...

Re: Schlitten für Fokusstacking
Do 28. Sep 2017, 23:35
Das ist der Notantrieb 
Re: Schlitten für Fokusstacking
Fr 29. Sep 2017, 19:33
Tja, dann melde ich mal Erfolg!
- Hochfrequenzgeräusch für meine alten Ohren nun unhörbar. Musste Poti dafür etwa 90° im Uhrzeigersinn drehen.
- Mit der neuen Firmware funktioniert bei mir nun auch der Stack-Modus "EASY": Start- und Stopposition lassen sich anfahren und korrigieren.
- Auslösekabel kann ich durch drehen des Steckers am Motor gut genug nutzen.
Großen Dank an Hans für seine unermüdliche Detektivarbeit, um die Problemursachen zu lokalisieren.
- Hochfrequenzgeräusch für meine alten Ohren nun unhörbar. Musste Poti dafür etwa 90° im Uhrzeigersinn drehen.
- Mit der neuen Firmware funktioniert bei mir nun auch der Stack-Modus "EASY": Start- und Stopposition lassen sich anfahren und korrigieren.
- Auslösekabel kann ich durch drehen des Steckers am Motor gut genug nutzen.
Großen Dank an Hans für seine unermüdliche Detektivarbeit, um die Problemursachen zu lokalisieren.
Re: Schlitten für Fokusstacking
Fr 29. Sep 2017, 20:09
Sauber!
Gerade bei Dir hatte ich Bedenken ob es Erfolg hat, aber anscheinend geht das Signal durch die Leitung tatsächlich bis zum Steuergerät
Mit windigen Grüssen von der Fähre nach La Gomera
Gerade bei Dir hatte ich Bedenken ob es Erfolg hat, aber anscheinend geht das Signal durch die Leitung tatsächlich bis zum Steuergerät
Mit windigen Grüssen von der Fähre nach La Gomera
Hosted by iphpbb3.com
Impressum | Datenschutz